Q.30 A closed-loop control system is stable if the Nyquist plot of the corresponding open loop transfer function
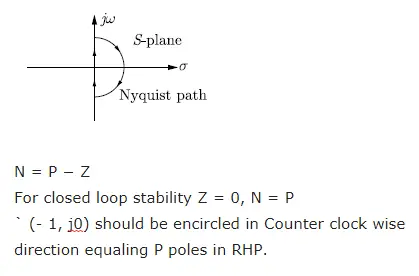
(A) encircles the s -plane point (− 1 + j0) in the counterclockwise direction as many times as the number of right-half s -plane poles.
(B) encircles the s -plane point (0 – j1) in the clockwise direction as many times as the number of right-half s -plane poles.
(C) encircles the s -plane point (− 1 + j0) in the counterclockwise
direction as many times as the number of left-half s -plane poles.
(D) encircles the s -plane point (− 1 + j0) in the counterclockwise
direction as many times as the number of right-half s -plane zeros.
Answer: (A)
Explanation:












{kind=link}